



Aufgrund der alternden Bevölkerung, der zunehmenden Verbreitung von Arthrose und Fettleibigkeit sowie des zunehmenden Versorgungsangebots werden in der Schweiz immer häufiger totale Knieprothesen (TKP) implantiert. Diese Eingriffe führen regelmäßig zu Indolenz und hervorragenden Ergebnissen bei der Gelenkfunktion. Trotz dieser hervorragenden Ergebnisse bleiben jedoch etwa 20 % der Patienten nach wie vor nicht vollständig zufrieden, weil das funktionelle Ergebnis nicht ihren Erwartungen entspricht und/oder die Schmerzen andauern. Es ist eindeutig erwiesen, dass der Erfolg einer TKP eng mit der Genauigkeit der Implantatpositionierung verbunden ist.
Heutzutage, wo die Qualität der Materialien und das Design der Implantate ein sehr hohes Leistungsniveau erreicht haben, bleibt die Präzision des chirurgischen Eingriffs ein wesentlicher Erfolgsfaktor. Standardmäßige oder «konventionelle» Implantationstechniken wurden nach und nach perfektioniert und verwenden sogenannte «mechanische» Instrumente. Letztere sind so konzipiert, dass der Chirurg je nach präoperativer Planung verschiedene Knochenschnitte vornehmen kann. Die Positionierung der Implantate hängt von diesen Knochenschnitten ab. Das Ziel des Chirurgen ist es, dank dieses «mechanischen» Instrumentariums die präoperative Planung mit Hilfe visueller oder palpatorischer Knochenmarker oder auf dem Instrumentarium selbst zu reproduzieren. Die Interpretation dieser Bezugspunkte liegt im Ermessen des Chirurgen, der sie empirisch validiert. Angesichts dieser Elemente besteht die Gefahr der Ungenauigkeit, und die Erfahrung des Chirurgen ist von signifikanter Bedeutung.
Die Grenzen konventioneller Techniken haben zur Entwicklung von Alternativen geführt, wobei Computertechnik und technische Fortschritte umfassend genutzt wurden, um die Implementierungsgenauigkeit und die langfristigen Ergebnisse zu optimieren.
Zwei Haupttechniken haben sich herauskristallisiert: individuelle Schnittführung und chirurgische Navigation.
Diese beiden Techniken haben zwar dasselbe Ziel, sind aber konzeptionell gegensätzlich:
• Die individuellen Schnittführungen werden vor der Operation auf der Grundlage der präoperativen Bildgebung (MRI oder CT) entwickelt. Es wird eine dreidimensionale Rekonstruktion des Gelenks erstellt, aus der Größe und Positionierung der Implantate in einer Software simuliert werden. Nach der Validierung durch den Chirurgen wird die Planung verwendet, um mit einem 3D-Drucker Blöcke zu erstellen, die auf der Oberfläche des Femurs und der Tibia (an deren Form sie perfekt angepasst sind) positioniert werden. Diese Blöcke sind mit einem Schlitz versehen, der das Sägeblatt beim Knochenschnitt führt und entsprechend der Planung ausgerichtet ist. Sobald die Schnittführungen hergestellt sind, werden sie steril verpackt und für die Operation ausgeliefert. Es ist wichtig, diese Technik nicht mit maßgefertigten Implantaten zu verwechseln, deren Konzept völlig anders ist.
Das Konzept der individuellen Schnittführungen ist zwar attraktiv, hat aber zwei Hauptnachteile: Es lässt nur sehr wenig Spielraum für Anpassungen während der Intervention, wenn die Bedingungen von den bei der Planung berücksichtigten abweichen, und es liefert keine Echtzeitdaten während der Intervention. Wenn der Schnitt durch die Führungsschiene erfolgt ist, hat der Chirurg, abgesehen von einer einfachen visuellen Kontrolle, keine Möglichkeit, sicherzustellen, dass der Schnitt wie geplant verläuft.
• Die chirurgische Navigation besteht in der Einführung eines mit Infrarotkameras gekoppelten Computers in den Operationssaal, der in Echtzeit die Positionierung der Knochenelemente, Instrumente und Implantate im Raum (millimeter- und gradgenau) verfolgt (Abbildung 1).

Im Gegensatz zur individuellen Schnittführung können Sie mit der Navigationsunterstützung auf eine dreidimensionale präoperative Bildgebung verzichten. Morphologische Daten des Gelenks werden während der Operation durch direktes Abtasten der Knochenoberflächen gewonnen. Dies erklärt, warum die Navigationsunterstützung die Dauer der Operation um etwa zehn Minuten verlängert. Mit diesen Daten kann der Computer eine sofortige dreidimensionale Rekonstruktion anfertigen. Der Chirurg hat in Echtzeit Zugriff auf statische Daten (3D-Dimensionierung, Achsenanalyse), aber auch auf dynamische Daten (Mobilitätsamplituden, Überwachung der Patellaführung, Grad der Bänderspannung). Dieses System erlaubt eine Kontrolle der ausgeführten Knochenschnitte im Vergleich zu den geplanten Schnitten und bietet die Möglichkeit zur Korrektur. Ebenso kann die Positionierung der Implantate jederzeit entsprechend den Befunden während der Operation angepasst werden, sodass ein hohes Maß an Anpassungsfähigkeit verbleibt.
So wie das GPS eines Autos dem Fahrer hilft, sein Ziel zu erreichen, indem es unterwegs Informationen in Echtzeit liefert, so hilft das Navigationssystem dem Chirurgen bei der Reproduktion der präoperativen Planung, indem es bei jedem Schritt der Operation Informationen in Echtzeit liefert. Am Ende des Verfahrens werden alle Schritte aufgezeichnet und zugänglich gemacht.
Navigation bei Knie-Totalprothesen
Grundsätzlich erlaubt das Kniegelenk Beugungs- und Streckbewegungen und muss in der Bewegung stabil bleiben. Die Patella, die sich vor dem Knie befindet, gleitet über die vordere Oberfläche des distalen (unteren) Teils des Oberschenkelknochens und ihre Verschiebung wird als «Patellaführung» bezeichnet.
Das Prinzip einer totalen Knieprothese (TKP) besteht darin, beschädigte Gelenkflächen im Oberschenkelknochen, im Schienbein und optional in der Patella zu ersetzen. Die kollateralen peripheren Bänder (medial und lateral) bleiben erhalten, während die Kreuzbänder (anterior und posterior) am häufigsten geopfert werden.
Knochenschnitte bei Tibia und Femur müssen nach genauen Kriterien ausgeführt werden, damit die geplante postoperative Ausrichtung erreicht wird. Die Ausrichtung ist jedoch nicht der einzige Parameter, der das Ergebnis einer TKP garantiert. Die Implantate müssen zudem genau dimensioniert sein, und es muss ein ausgewogenes Maß an Spannung zwischen den beiden Seitenbändern erreicht werden, sowohl in der Streckung als auch in der Beugung. Dabei handelt es sich um einen Bandausgleich, der eine gute Gelenkstabilität bei Flexions-/Extensionsbewegungen gewährleistet. Schließlich muss die Patella, unabhängig davon, ob ihre Gelenkfläche erhalten bleibt oder ersetzt wird, beim Beugen/Strecken vor dem Femurimplantat zentriert bleiben.
Eine TKP ist nur dann in Bezug auf Funktion und Schmerz zufriedenstellend, wenn alle diese Parameter unter Kontrolle sind.
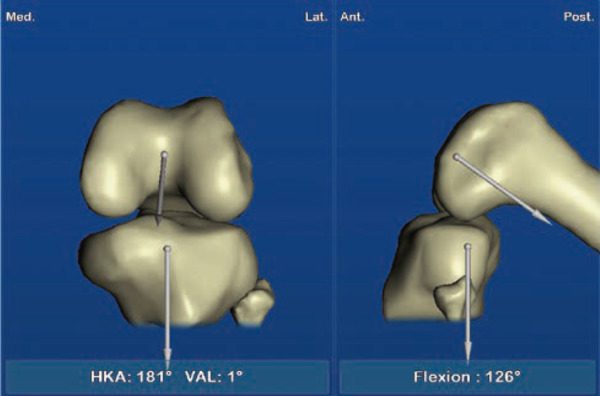
Die Navigation wurde Ende der 1990er Jahre für TKP mit dem Ziel eingeführt, die Steuerung dieser verschiedenen Parameter zu optimieren. Das Prinzip besteht darin, während der Operation durch einfaches Abtasten der Knochenoberflächen morphologische Daten der Tibia und des Femurs zu gewinnen. Die Software führt eine dreidimensionale Rekonstruktion des Gelenks durch und schlägt eine Implantatgröße für den Oberschenkelknochen und die Tibia vor. Das System bestimmt die Beugungs-/Streckungsamplituden des Knies vor der Implantation (Abbildung 2) sowie den jeweiligen Grad der Spannung des medialen und lateralen Seitenbandes. Anschließend leitet es den Chirurgen an, Knochenschnitte in Tibia und Femur vorzunehmen, um die gewünschte Ausrichtung der unteren Extremität zu reproduzieren. Die Navigation ermöglicht die Kontrolle in Echtzeit und gegebenenfalls die Korrektur eines Knochenschnitts. Sie ermöglicht es auch, den Grad der Spannung zwischen den 2 Seitenbändern beim Strecken und Beugen zu kontrollieren, um die Stabilität der Prothese zu gewährleisten. Schließlich unterstützt das Navigationssystem den Chirurgen bei der Positionierung der Femurkomponente, um die Patellaführung beim Beugen/Strecken zu optimieren.
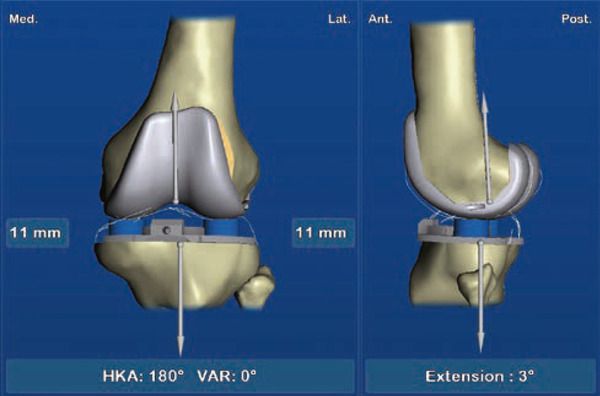
Die TKP-Navigation ermöglicht daher eine präzise, objektive Echtzeitkontrolle aller Parameter, die das funktionelle Ergebnis einer TKP bestimmen (Abbildung 3). Diese Technik bietet daher die Aussicht, Funktionsergebnisse und Langlebigkeit der TKP langfristig zu optimieren.
Die jüngsten Daten in der Literatur zeigen eine signifikante Verringerung des Risikos einer Fehlausrichtung, wenn die Navigationsunterstützung eingesetzt wird (Verringerung von «Ausreißern») sowie eine verbesserte Reproduzierbarkeit der Implantatpositionierung. Darüber hinaus zeigen die Daten aus dem australischen Register eine signifikante Verringerung des Risikos einer Revision der TKP bei jungen Patienten, die eine TKP mit Navigationsunterstützung erhalten haben. Schließlich zeigt ein kürzlich durchgeführter Literaturüberblick (2020) leicht höhere Zufriedenheitswerte bei Patienten, deren TKP mit Navigationsunterstützung implantiert wurde. Es werden weiterhin längerfristige Daten benötigt.
Fazit
Navigationsunterstützung ist eine Technik, die mit Präzision und Zuverlässigkeit auf die Grenzen der «mechanischen» Standardinstrumente reagiert. Ihre Weiterentwicklung (Miniaturisierung der Instrumente, Ergonomie, Benutzerfreundlichkeit der Software) in den letzten zehn Jahren hat ihre Attraktivität erhöht. Obwohl sie die Operationszeit um einige Minuten verlängert, hat sie den Vorteil, den chirurgischen Eingriff sicherer zu gestalten, indem sie die verschiedenen Parameter in Echtzeit kontrolliert, um dem Chirurgen zu helfen, das bei der präoperativen Planung gesetzte Ziel zu erreichen.
Jüngste Daten in der Literatur bestätigen den Wert der Navigationsunterstützung bei der signifikanten Reduzierung des Risikos von Ausrichtungsfehlern. Es zeichnen sich ermutigende Daten ab, die von einem geringeren Revisionsrisiko für TKP berichten, die vor dem 65. Lebensjahr mit Navigationsunterstützung implementiert wurden, und von geringfügig besseren funktionellen Ergebnissen als die mit herkömmlichen Systemen erzielten.
In einer Zeit, in der Computer und technische Innovationen in unser tägliches Leben eingedrungen sind, sowohl zu Hause als auch unterwegs, ist es nicht überraschend, Computer in Operationssälen zu sehen…
Diese Entwicklung eröffnet vielversprechende Zukunftsperspektiven, insbesondere die Entwicklung so genannter «aktiver» Navigationssysteme, bei denen die Navigation mit einem Roboterarm gekoppelt werden kann, um Knochenschnitte mit immer höherer Präzision durchzuführen, in der Hoffnung, den Service für die Patienten ständig zu verbessern.







0 Kommentare